- с.Большая черниговка, ул. Мира д.1
 1960
1960
В СССР разработана первая универсальная полупроводниковая управляющая машина "Днепр" (В.М.Глушков, Б.Н. Малиновский). Ее выпуск начнется в следующем году, одновременно с появлением таких машин в США.
 Первый робот "Versatran", предназначенный для практического промышленного использования, разработан в компании AMF (American Machine and Foundry) Джонсоном (Harry Johnson) и Миленковичем (Veljko Milenkovic).
Первый робот "Versatran", предназначенный для практического промышленного использования, разработан в компании AMF (American Machine and Foundry) Джонсоном (Harry Johnson) и Миленковичем (Veljko Milenkovic).
 В Университете Джона Хопкинса (Johns Hopkins University) создано кибернетическое устройство, получившее известность как "Животное Хопкинса" (Hopkins Beast). Под управлением транзисторных схем "Животное" блуждало по коридорам физической лаборатории, пока не "чувствовало" разрядку аккумуляторных батарей. После чего с помощью специального оптического фотоэлемента начинало искать на белых стенах лаборатории черные розетки. Найдя такую розетку, "Животное" с помощью специальной чувствительной руки со штепселем заряжало свои батареи и снова переходило в режим "блуждания". Поведение "Животного" можно было сравнивать с поведением одноклеточных организмов, подобных амебе.
В Университете Джона Хопкинса (Johns Hopkins University) создано кибернетическое устройство, получившее известность как "Животное Хопкинса" (Hopkins Beast). Под управлением транзисторных схем "Животное" блуждало по коридорам физической лаборатории, пока не "чувствовало" разрядку аккумуляторных батарей. После чего с помощью специального оптического фотоэлемента начинало искать на белых стенах лаборатории черные розетки. Найдя такую розетку, "Животное" с помощью специальной чувствительной руки со штепселем заряжало свои батареи и снова переходило в режим "блуждания". Поведение "Животного" можно было сравнивать с поведением одноклеточных организмов, подобных амебе.
Иешуа Бар-Хиллел (Yehoshua Bar-Hillel) указывает на невозможность полностью автоматического высококачественного машинного перевода с одного естественного языка на другой. Чтобы это произошло, программа должна фактически понять мир.
 1961
1961
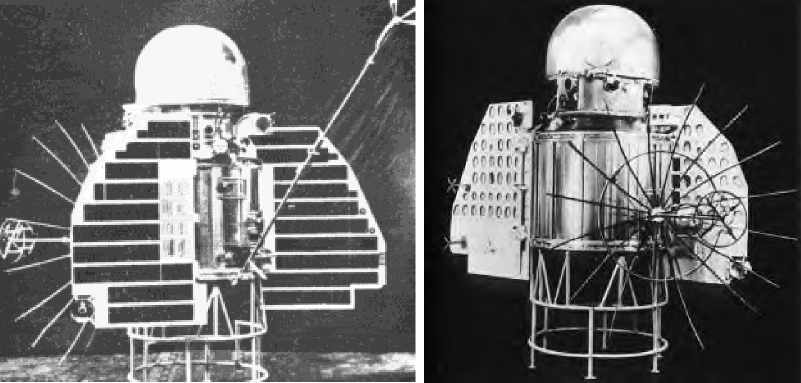
С космодрома Байконур осуществлен пуск ракеты-носителя "Молния", которая вывела на траекторию полета к Венере советскую автоматическую межпланетную станцию "Венера-1". В ходе этого полета впервые в истории осуществлена двусторонняя связь с автоматической станцией, удаленной на 1,400,000 км.
Генрих Эрнст (Heinrich Ernst) разрабатывает в MIT управляемый компьютером манипулятор MH-1.
Ральф Мозер (Ralph Moser) в General Electric начинает разработку стопоходящего грузовика. Машина будет иметь четыре ноги, весить 1300 кг. и иметь скорость до 4 миль в час.
 1962
1962
В СССР начат выпуск ЭВМ "Минск-2" (с 1965 г. – "Минск-22"), разработанной под руководством В.В.Пржиялковского. В Минск-2 использовалась импульсно потенциальная элементная база и было введено представление данных в виде двоично-десятичных чисел и алфавитно-цифровых слов. Машина Минск-22 использовалась в первом луноходе.
Джо Энгельбергер (Joe Engelberger) внедряет первые разработанные Unimation промышленные роботы-манипуляторы на заводах автоконцерна General Motors в Нью Джерси. Простейшие контроллеры роботов считывают команды с магнитного барабана. Механические руки, получившие название Unimate, используются для выполнения наиболее неприятных операций при сборке автомобилей и позволяют перемещать 40-килограммовые детали в трёх плоскостях..
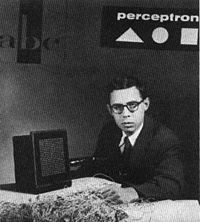 Фрэнк Розенблатт (Frank Rosenblatt) издает "Principles of Neurodynamics", в которых описывает перцептрон.
Фрэнк Розенблатт (Frank Rosenblatt) издает "Principles of Neurodynamics", в которых описывает перцептрон.
 1963
1963
Марвин Мински публикует "Шаги к искусственному интеллекту" (Steps Toward Artificial Intelligence).
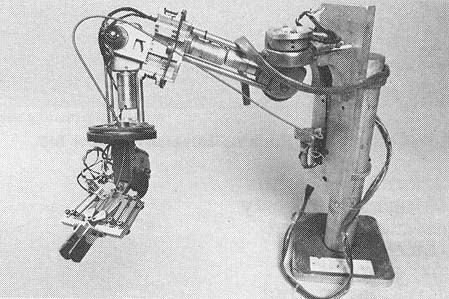 В Rancho Los Amigos Hospital в Калифорнии создана управляемая компьютером искусственная роботизированная рука Rancho Arm, имеющая шесть степеней свободы.
В Rancho Los Amigos Hospital в Калифорнии создана управляемая компьютером искусственная роботизированная рука Rancho Arm, имеющая шесть степеней свободы.
Впервые в мировой практике космических разработок сотрудниками кафедры СМ-7 в МВТУ совместно с ведущими организациями атомного манипуляторостроения создан манипулятор для размещения на внешней поверхности аппаратов типа «Восток». Управление манипулятором осуществляется с помощью специальных задающих устройств управления, имитирующих перемещения в пространстве руки человека. Сложность проблемы определялась необходимостью исключения влияние на работу манипулятора переменных параметров объекта управления при значительном изменении внешних нагрузочных моментов, а также наличием упругих деформаций, люфтов и существенных потерь передаваемого момента в сложных пространственных механических передачах.
1964
Джон Маккарти покидает MIT и основывает Artificial Intelligence Laboratory в Стэнфордском университете (Stanford University). Лаборатории искусственного интеллекта создаются в Стэнфордском институте (Stanford Research Institute - SRI), Эдинбургском Университете (University of Edinburgh), а через год в Университет Карнеги-Меллона (Carnegie Mellon University).
Джон Кимини (John Kemeny) Томас Куртц (Thomas Kurtz) в Dartmouth College разрабатывают BASIC - один из самых популярных языков программирования.
Дэниел Бобров (Daniel Bobrow) завершает свою докторскую работу "Student" - программу, оперирующую естественным языком, которая может решать алгебраические задачи уровня средней школы.
1965
Впервые применена аппаратная реализация языков высокого уровня в малых ЭВМ серии МИР (МИР-1, МИР-2, МИР-3). На машинах серии МИР можно было проводить аналитические преобразования, в том числе дифференцирование и интегрирование формул. В 1967 г. на выставке в Лондоне, где демонстрировались МИР-1, ее купила IBM - к тому времени поставщик почти 80% вычислительной техники для всего капиталистического мира. Это была первая - и, к сожалению, последняя - советская электронная машина, приобретенная американской компанией.
Проект DENDRAL начат в Стэнфордском университете, возглавляемый Брюсом Бучананом (Bruce Buchanan), Эдвардом Фейгенбаумом (Edward Feigenbaum) и нобелевским лауреатом Джошуа Ледербергом (Joshua Lederberg). Цель проекта - эксперимент с базой знаний как основой осмысленного поведения при решении задач (problem solving behavior). Первая экспертная система, DENDRAL, воплощает базу знаний относительно анализа молекулярных структур. Последующая работа, выполненная в начале 70-ых, приведет к созданию Meta-DENDRAL - самообучающейся программы, которая автоматически изобретает новые правила для DENDRAL.
Годрон Мур (Gordon Moore), один из будущих основателей Intel, отмечает, что новые модели микросхем разрабатываются примерно через 18-24 месяца, а емкость их при этом возрастает каждый раз примерно вдвое. Наблюдение Мура станет известно как "Закон Мура".
1966
Советская автоматическая станция "Луна-9" первой в мире совершила мягкую посадку на поверхности Луны. Через несколько минут после прилунения в Океане Бурь автоматическая система станции начала первый в истории человечества сеанс "радиопередачи с поверхности Луны".
Автоматическая станция "Венера-3" впервые достигла поверхности Венеры, доставив вымпел СССР. Это был первый в мире перелет автоматического аппарата с Земли на другую планету.
В СССР создан революционный представитель ЭВМ второго поколения – БЭСМ-6, предвосхитивший архитектуру машин третьего поколения. В БЭСМ-6 впервые в мире появляется прообраз современной кэш-памяти. Под руководством В. М. Глушкова завершена разработка проекта большой ЭВМ "Украина" с архитектурой, отличной от принципов Дж. фон Неймана и наметившей многие идеи американских больших ЭВМ 70-х годов.
Росс Квиллиан (Ross Quillian) в Carnegie Inst. of Technology демонстрирует семантические сети.
В Стэнфордском институте (Stanford Research Institute, далее SRI) начат проект по созданию мобильного робота, который может рассуждать об окружающей обстановке. Созданный робот за свою неустойчивость будет назван “Шейки” (Shakey) - трясучка.
Профессор Джозеф Вейзенбаум (Joseph Weizenbaum) в MIT создает ЭЛИЗУ (ELIZA) - интерактивную программу, которая способна поддерживать диалог по-английски о любом предмете. Содержащая первоначально 240 строк кода, ЭЛИЗА настолько успешно имитировала психотерапевта, что Вейзенбаум был поражен, насколько люди склонны были видеть в ней реального человека. Программа искусно манипулировала формулировками пользователя, чтобы формировать собственные вопросы.
1967
Ричард Гринблатт (Richard Greenblatt) пишет MacHack - программу, играющую в шахматы. MacHack явилась откликом на статью Хуберта Дрейфуса (Hurbert Dreyfus), в которой он делает критический анализ усилий в области искусственного интеллекта и сообщает, что компьютерная программа никогда не могла бы победить его в шахматной игре. Когда MacHack была закончена, Дрейфус был приглашен играть с компьютером. Первоначально ведущий в счете, он в конечном итоге полностью проигрывает к концу матча.
Сеймур Паперт (Seymour Papert) и его команда в MIT начинают работать над языком ЛОГО (LOGO). Основой ЛОГО является своеобразный робот "черепашка", которому можно отдавать простые, интуитивно понятные команды. Базирующийся на LISP, ЛОГО станет одним из популярнейших средств обучения программированию.
Япония начинает импортировать роботы Versatran (первые роботы, проданные японцам).
Начинается выпуск роботов Unimate по лицензии в Англии и Швеции.
1968
Kawasaki начинает выпускать Unimate по лицензии в Японии.
Осьминогоподобный манипулятор разработан Марвином Мински. Двенадцать сочленений управлялись ЭВМ PDP-6. Манипулятор был способен поднять взрослого человека.
В СССР разработан параллельный компьютер М-9. В М-9 операции могли задаваться над функциями двух переменных (М.А. Карцев).
Создано Особое конструкторское бюро технической кибернетики (ОКБ ТК) при Ленинградском политехническом институте, которое в 1981 г. будет преобразовано в Центральный научно-исследовательский и опытно-конструкторский институт робототехники и технической кибернетики (ЦНИИ РТК).
1969
Марвин Мински и Сеймур Паперт публикуют "Perceptrons". Книга демонстрирует пределы простых однослойных нейросетей.
Одо Студжер (Odo Stuger) и Ричард Морли (Richard Morley) независимо разрабатывают Программируемый Логический Контроллер (Programmable Logic Controller - PLC). Это изобретение производит поистине драматические изменения в робототехнике.
Виктор Шейнман (Victor Scheinman) в Стэнфордской лаборатории искусственного интеллекта (SAIL) создает манипулятор, получивший имя Стэнфордская рука (Stanford Arm). Кинематическая конфигурация этого манипулятора становится стандартом, известным как Стандартная Рука (Standard Arm).
Стэнфордский (SRI) интегральный робот Шейки (Shakey) представлен как первый мобильный робот, управляемый искусственным интеллектом.Шейки обеспечивал выполнение задания, даже если оно было сформулировано в самом общем виде. Робот мог действовать в помещениях, где находилось несколько недеформируемых предметов простой формы. Система технического зрения позволяла ориентироваться в окружающей среде, избегать препятствий и принимать решения о дальнейшем маршруте.Стэнфордский интегральный робот Шейки Шейки использовал бортовую ЭВМ SDS-940, телекамеру, лазерный дальномер и датчики столкновения на бампере, чтобы собрать данные, которые затем передавались по радиоканалу на стационарные ЭВМ PDP-10 и PDP-15 производства DEC. Обратные команды передавались также по радиоканалу, что позволяло Шейки перемещаться со скоростью 2 метра в час.Хотя уже через два года финансирование проекта было прекращено, Стэнфордский мобильный робот стал одной из выдающихся вех в истории робототехники.
В СССР созданы первые интегральные исследовательские роботы ЛПИ-1, а чуть позднее - ЛПИ-2.
Под эгидой DARPA компанией «Bolt, Beranek and Newman» развернута компьютерная сеть ARPANET. К сети были подключены четыре университета и исследовательские лаборатории на территории США. Сеть предназначалась для отработки методов поддержания связи в случае ядерного нападения. ARPANET явилась прообразом сети Internet.
В СССР создана компьютерная сеть с каналами передачи данных длиной в десятки тысяч километров. В ней использовалось свыше 50 машин М4-2М и М4-3М. Сеть создана в рамках первого этапа работ по созданию системы предупреждения о ракетном нападении.